“黑土粮仓”先导专项在黑土地智能农机高精度定位技术取得进展
| 来源:黑土粮仓科技会战【字号:大 中 小】
高精度定位服务是提升黑土地智能农机的精准、高效、自动化作业水平的关键支撑,然而,由于黑土地地域辽阔,网络覆盖条件各异,区域参考站数量较少,当前采用的定位解决方案无法满足智能农机作业的定位需求。
中国科学院国家授时中心“黑土地广域天基定位技术”研究团队针对黑土地智能农机广域高精度定位需求,开展持续研究,完善现有技术,探索新的技术方案,目前已获得一种基于天地一体化的广域高精度定位系统及方法、一种分布式北斗位置服务中心 PPP 产品定位方法及装置等七项发明专利授权。
针对智能农机在导航定位精度和环境感知能力的需求,研究团队提出了一种适用于自动驾驶农机的多传感器融合导航定位系统及方法,该方法通过双目视觉相机和惯性测量装置来弥补GNSS定位信号受到干扰时的定位精度,利用多传感器融合算法对双目视觉相机、IMU装置、GNSS接收机获取的智能农机的信息进行融合定位,提高智能农机的定位精度和定位鲁棒性,为智能农机提供高精度实时的定位信息和三维地图信息。该方法已申请发明专利。
在复杂环境下,针对车载GNSS/INS组合导航系统GNSS信号失锁时出现定位精度下降甚至发散的问题,研究团队提出了一种长短期记忆(LSTM)神经网络辅助组合导航的算法,该算法克服了传统神经网络模型存在的梯度爆炸和消失、无法捕捉长时间影响等不足,保障定位连续可用。
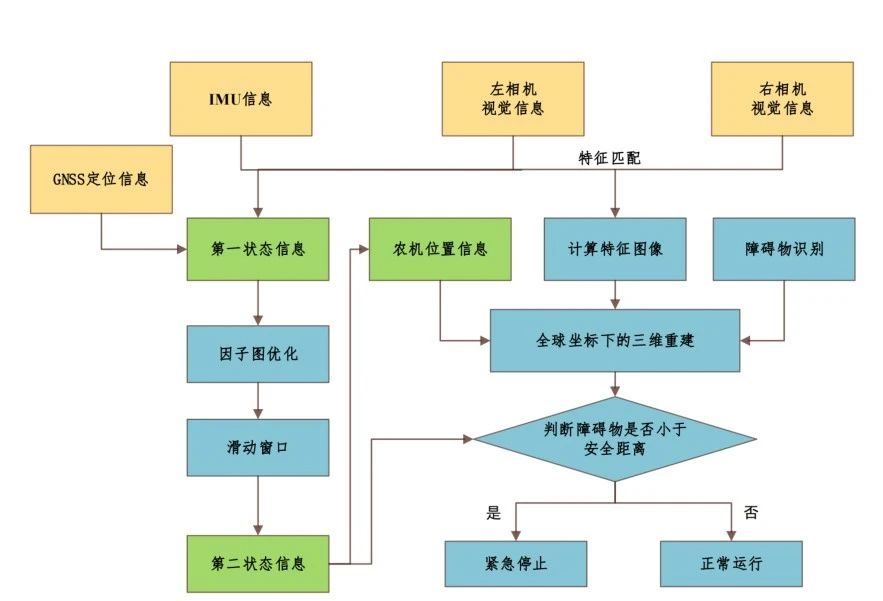
图1 一种适用于自动驾驶农机的多传感器融合导航定位方法的流程图
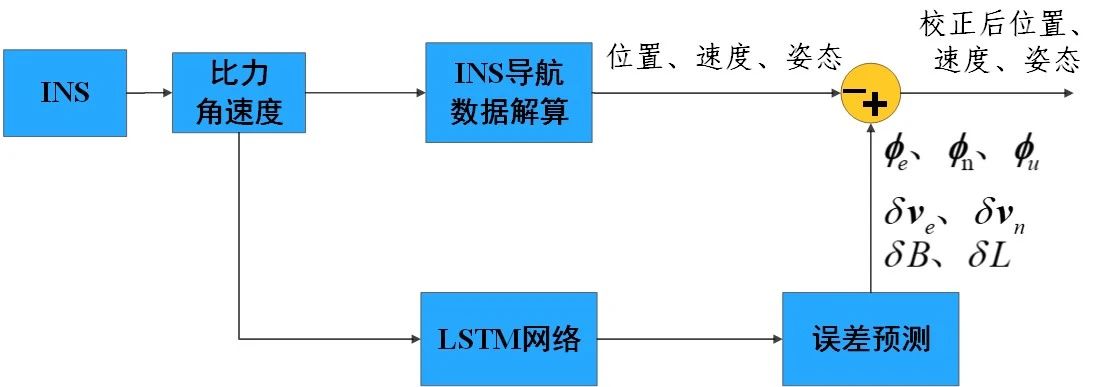
图2 LSTM辅助GNSS/INS组合导航预测阶段原理图

